On This Page
- Introduction to Rotational Motion for NEET
- Understanding Torque and Its Physical Significance
- Moment of Inertia: The Rotational Analog of Mass
- Calculating Moment of Inertia for Standard Bodies
- The Theorems of Parallel and Perpendicular Axes
- Angular Acceleration and Kinematics of Rotation
- Work and Power in Rotational Motion
- Rotational Kinetic Energy and Rolling Motion
- Angular Momentum and Its Conservation
- Equilibrium of Rigid Bodies
- Effective Revision Strategies for Rotational Motion
Introduction to Rotational Motion for NEET
Rotational motion is a fundamental chapter in the NEET Physics syllabus, bridging the gap between basic kinematics and complex rigid body dynamics. Understanding how objects rotate around a fixed axis is essential for solving many mechanics problems.
Transitioning from Linear to Rotational Mechanics
In linear motion, we deal with displacement, velocity, and mass. In rotational motion, these translate to angular displacement, angular velocity, and moment of inertia, creating a parallel framework for students to follow.
By recognizing these analogies, you can easily adapt linear formulas to solve rotational problems. For instance, force becomes torque, and mass becomes the moment of inertia, simplifying the conceptual transition significantly during revision.
Why Rotational Motion is Crucial for NEET Aspirants
NEET often features multi-concept questions that combine rotational mechanics with gravitation or electrostatics. Mastering this topic ensures you can handle these integrated problems with confidence and precision during the exam.
Statistics show that at least two to three questions from this chapter appear annually. A solid grasp of rotational dynamics can provide the competitive edge necessary to secure a high rank in the medical entrance test.
Understanding Torque and Its Physical Significance
Torque is the rotational equivalent of force, representing the tendency of a force to rotate an object about an axis. It is a vector quantity that depends on the magnitude and direction of the applied force.
The Concept of Moment of Force
The "moment of force" is another name for torque, emphasizing the importance of the distance from the pivot. The further the force is applied from the axis, the greater the rotational effect produced.
Mathematically, torque is defined as the cross product of the position vector and the force vector. This relationship highlights that only the perpendicular component of the force contributes to the actual rotation of the body.
Torque in Vector Form and Magnitude Calculation
In vector notation, torque is expressed as:
This formula is vital for solving three-dimensional problems where the direction of rotation must be determined using the right-hand thumb rule.
For scalar calculations, the magnitude is given by: ##\tau = rF \sin(\theta)##
where ##\theta## is the angle between the position and force vectors. NEET aspirants must practice various configurations to master this calculation quickly.
Moment of Inertia: The Rotational Analog of Mass
Moment of inertia, often denoted by ##I##, measures an object's resistance to changes in its rotational motion. Unlike mass, which is constant for a body, the moment of inertia depends on the distribution of mass.
Defining Moment of Inertia for Point Masses
For a system of point masses, the moment of inertia is calculated by summing the products of each mass and the square of its distance from the axis of rotation.
The general formula for a discrete system is:
This equation demonstrates that mass further from the axis contributes significantly more to the rotational inertia than mass located closer to the center.
Factors Affecting the Moment of Inertia
The moment of inertia is not an intrinsic property of a body; it varies with the choice of the axis. Changing the rotation axis changes the distance ##r## for every particle in the object.
Additionally, the shape and size of the body play a critical role. A hollow cylinder has a higher moment of inertia than a solid one of the same mass, as the mass is distributed further out.
Calculating Moment of Inertia for Standard Bodies
NEET frequently asks questions involving standard geometric shapes. Memorizing these formulas is a non-negotiable part of your preparation, as they serve as the building blocks for more complex rigid body problems.
Moments of Inertia for Rings and Discs
For a thin ring of mass ##M## and radius ##R## rotating about its central axis, the moment of inertia is ##I = MR^2##. This represents the maximum possible inertia for that mass and radius.
In contrast, a solid disc of the same dimensions has a moment of inertia of:
This reduction occurs because the mass of the disc is distributed throughout its area, rather than being concentrated at the outer rim.
Moments of Inertia for Spheres and Rods
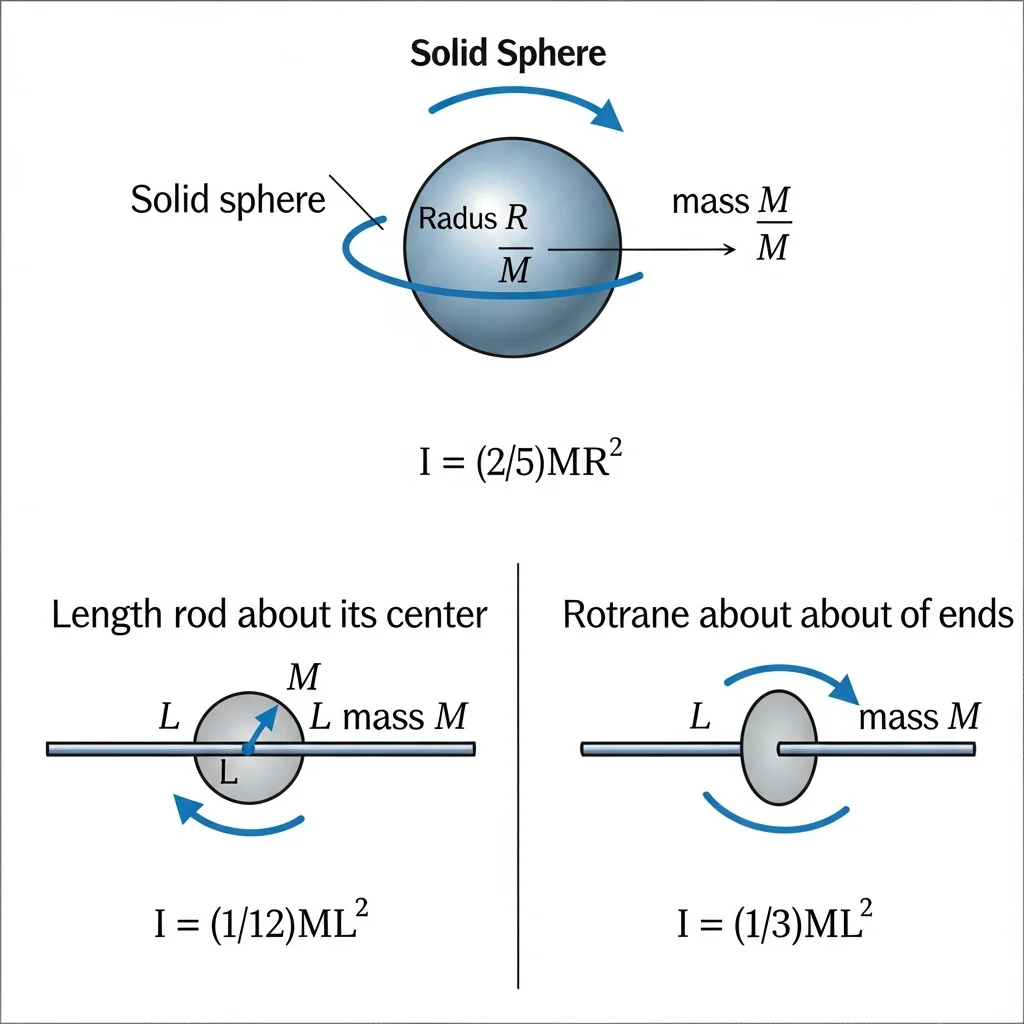
A solid sphere rotating about its diameter has an inertia of ##I = \frac{2}{5}MR^2##. This is a common formula used in rolling motion problems, where spheres are often the primary objects of study.
For a thin rod of length ##L## rotating about its center, the formula is ##I = \frac{1}{12}ML^2##. If the axis shifts to one end, the inertia increases to ##\frac{1}{3}ML^2## due to the mass distribution change.
The Theorems of Parallel and Perpendicular Axes
These two theorems are essential tools for finding the moment of inertia about any arbitrary axis. They allow students to derive complex formulas from the standard ones they have already memorized.
Applying the Parallel Axis Theorem Efficiently
The parallel axis theorem states that the moment of inertia about any axis is equal to the inertia about a parallel axis through the center of mass plus ##Md^2##, where ##d## is the distance.
The formula is written as:
This is particularly useful when dealing with objects rotating about their edges or tangential points, which is a common scenario in NEET physics questions.
Understanding the Perpendicular Axis Theorem Constraints
The perpendicular axis theorem is applicable only to planar bodies (laminae). It states that the inertia about an axis perpendicular to the plane is the sum of the inertias about two perpendicular axes.
The mathematical expression is ##I_z = I_x + I_y##. It is crucial to remember that all three axes must intersect at a single point for this theorem to hold true during your calculations.
We Also Published
Angular Acceleration and Kinematics of Rotation
Angular acceleration (##\alpha##) describes the rate of change of angular velocity over time. It is the rotational counterpart to linear acceleration and is measured in radians per second squared (##rad/s^2##).
Relationship Between Linear and Angular Acceleration
For a point on a rotating body, the tangential acceleration is directly proportional to the angular acceleration and the distance from the axis. This link is vital for solving circular motion problems.
The relationship is expressed as:
Understanding this connection allows you to switch between linear and angular perspectives, which is often required in complex NEET questions involving pulleys or rolling wheels.
Rotational Kinematic Equations for Constant Acceleration
Just as we have equations for linear motion, we have analogous equations for rotation with constant angular acceleration. These equations relate angular displacement, velocity, acceleration, and time in a predictable manner.
The standard equations include: ##\omega = \omega_0 + \alpha t## ##\theta = \omega_0 t + \frac{1}{2}\alpha t^2##
Mastering these allows for quick calculation of a body's state of motion at any given moment.
Work and Power in Rotational Motion
In rotational dynamics, work is done when a torque causes an angular displacement. This concept is essential for understanding how energy is transferred to or from a rotating system.
Calculating Work Done by a Torque
The work done by a constant torque is the product of the torque and the angular displacement it produces. This mirrors the linear work formula where work equals force times displacement.
The formula is:
For a constant torque, this simplifies to ##W = \tau \Delta \theta##. Students should be careful to use radians for the angular displacement to ensure the units remain consistent.
Rotational Power and Its NEET Applications
Power is the rate at which rotational work is performed. In the context of engines or motors, calculating rotational power is a frequent requirement in applied physics problems for medical entrance exams.
The expression for instantaneous power is:
By knowing the torque and the angular velocity, you can determine how much energy is being delivered to a system per unit of time, which is a key performance metric.
Rotational Kinetic Energy and Rolling Motion
A rotating body possesses kinetic energy due to its motion. When a body rolls without slipping, it possesses both translational and rotational kinetic energy, which must be summed for the total energy.
Formula for Pure Rotational Kinetic Energy
For an object rotating about a fixed axis, the rotational kinetic energy is proportional to the moment of inertia and the square of the angular velocity, similar to linear kinetic energy.
The formula is:
This energy depends heavily on how the mass is distributed; hence, bodies with higher moments of inertia will store more energy at the same angular velocity.
Total Energy in Rolling Without Slipping
In pure rolling, the total kinetic energy is the sum of translational and rotational components. This is a favorite topic for NEET examiners because it tests multiple concepts simultaneously.
The total energy is:
Using the condition ##v = r\omega##, this can be simplified further to solve for the velocity of objects rolling down an inclined plane or along a flat surface.
Angular Momentum and Its Conservation
Angular momentum is the rotational equivalent of linear momentum. It is a conserved quantity in isolated systems, making it one of the most powerful tools in physics for analyzing rotational dynamics.
Defining Angular Momentum for a Particle
For a single particle, angular momentum is the cross product of its position vector and its linear momentum vector. It represents the "quantity of rotation" the particle possesses.
The vector formula is:
For a rigid body rotating about a fixed axis, this simplifies to ##L = I\omega##. Understanding both forms is necessary for tackling different types of problems in the NEET exam.
The Principle of Conservation of Angular Momentum
If the net external torque acting on a system is zero, the total angular momentum of that system remains constant. This principle explains why ice skaters spin faster when they pull in their arms.
The conservation law is stated as:
This equation is frequently used in problems involving internal mass redistribution, such as a person walking on a rotating platform or planets orbiting the sun.
Equilibrium of Rigid Bodies
A rigid body is in complete equilibrium only if both translational and rotational equilibrium conditions are met. This requires the sum of all forces and the sum of all torques to be zero.
Translational vs. Rotational Equilibrium Conditions
Translational equilibrium occurs when the net external force is zero (##\sum F = 0##). This ensures that the center of mass of the body remains either at rest or moves with constant velocity.
Rotational equilibrium occurs when the net external torque is zero (##\sum \tau = 0##). This prevents any change in the angular velocity of the body about any chosen axis of rotation.
Solving Complex Problems with Force and Torque Balance
To solve equilibrium problems, one must carefully choose a pivot point to calculate torques. Choosing a point where unknown forces act can simplify the equations by making their torques zero.
NEET problems often involve ladders leaning against walls or beams supported by strings. Practicing these scenarios helps in developing the intuition needed to set up the correct equilibrium equations quickly.
Effective Revision Strategies for Rotational Motion
Success in NEET Physics requires more than just understanding; it requires the ability to recall and apply formulas under pressure. Rotational motion demands a structured approach to revision and practice.
Creating a Formula Sheet for Quick Recalls
Compile all rotational formulas, including moments of inertia for standard bodies and kinematic equations, into a single-page reference. Visualizing these daily helps in long-term retention and quick retrieval during the exam.
Include the analogies between linear and rotational motion on your sheet. Seeing ##F = ma## next to ##\tau = I\alpha## reinforces the conceptual patterns that make the subject easier to master and remember.
Common Pitfalls and How to Avoid Them in NEET
One common mistake is forgetting to check the axis of rotation before applying a formula. Always verify if the axis passes through the center of mass or if a theorem is required.
Another pitfall is using degrees instead of radians in angular calculations. Ensure all your angular units are converted to radians to maintain consistency with the standard SI units required for correct numerical answers.
From our network :
- Limits: The Squeeze Theorem Explained
- How to secure postgres connections across VPC, VPN, and cloud
- Bitcoin price analysis: Market signals after a muted weekend
- Bitcoin Hits $100K: Crypto News Digest
- The Diverse Types of Convergence in Mathematics
- How to design postgres partitions with native and hash methods
- Limit Superior and Inferior
- How to migrate to postgres using logical replication and cutover
- JD Vance Charlie Kirk: Tribute and Political Strategy
RESOURCES
- r/JEENEETards on Reddit: Rotational motion is not .....that hard?
- How to prepare for rotational motion on the NEET - Quora
- Is rotational motion that hard? : r/JEENEETards - Reddit
- I'm currently preparing for the NEET 2022. Can I read rotational ...
- So is it normal to still struggle with Rotational Motion after weeks of ...
- Rotational Motion Notes for NEET | PDF - Scribd
- Syllabus for Examination of NEET UG 2025 - National Testing Agency
- Rotational Motion Formula Sheet Class 11 | PDF | Torque - Scribd
- Rotational Motion: Key Concepts & Applications - Allen.In
- NEET Physics Questions: Rotational Motion - NEETSHALA
- Rotational Motion | Physics | NEET Previous Year Questions
- NEET Previous year questions (2014-2025): System of Particles and ...
- Rotational Motion NEET Notes - 2026 Free PDF - Vedantu
- Rotational Motion-Neet-Sheet-Ex1-Q54-CP-V1-Kuldeep-HB.mp4
- Physics: Chapter 7 - System of Particles and Rotational Motion